Table tennis robot drills
One of our goals for the robot is the ability for the user to use different drills as well as make it easy to set up these drills.
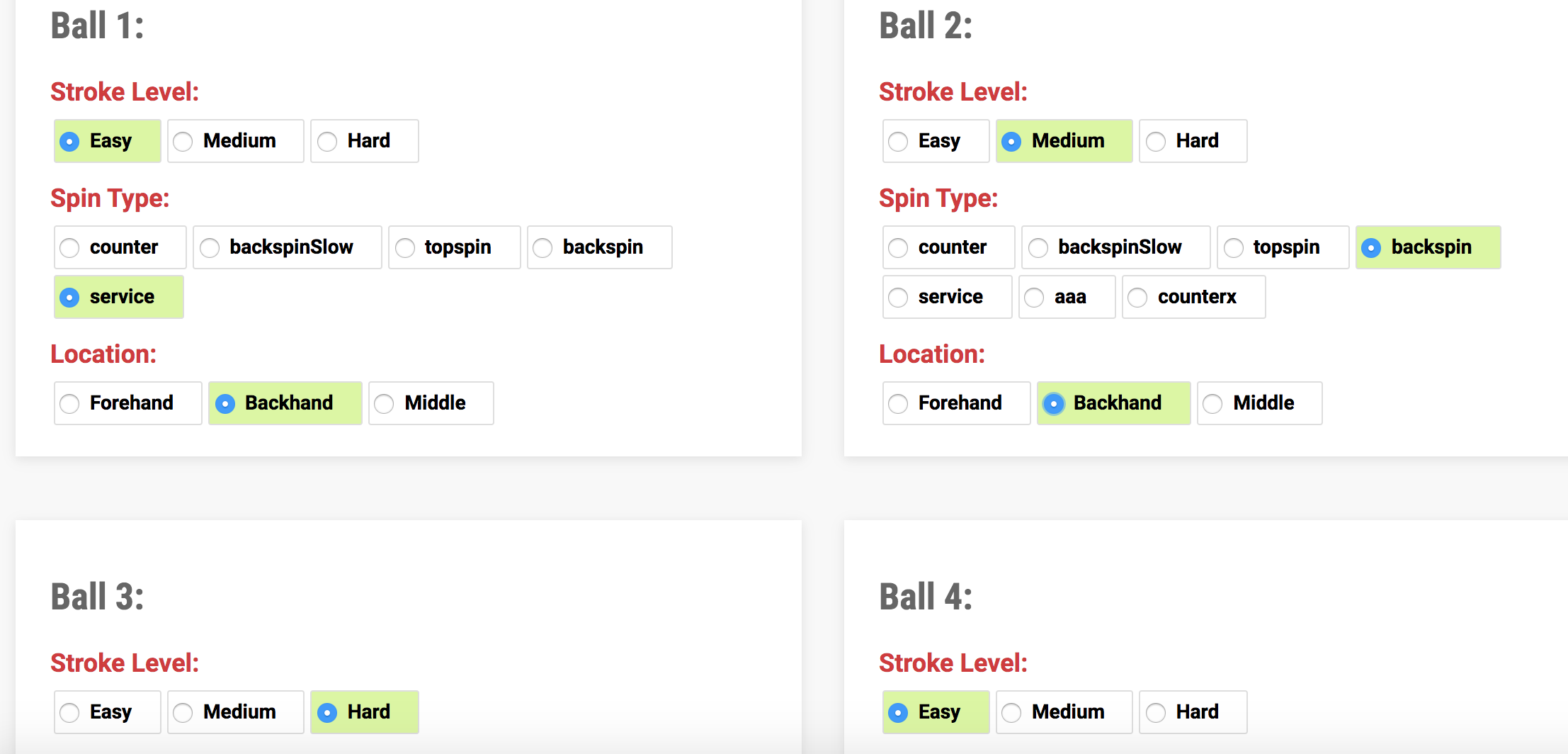
Before we begin the robot drills, the user can configure the number of balls for a drill; one of the reasons is that a player starts playing the wrong shots as he starts getting tired. Number of balls is a global option, and this option is for all the drills
Let us look at the different options available.
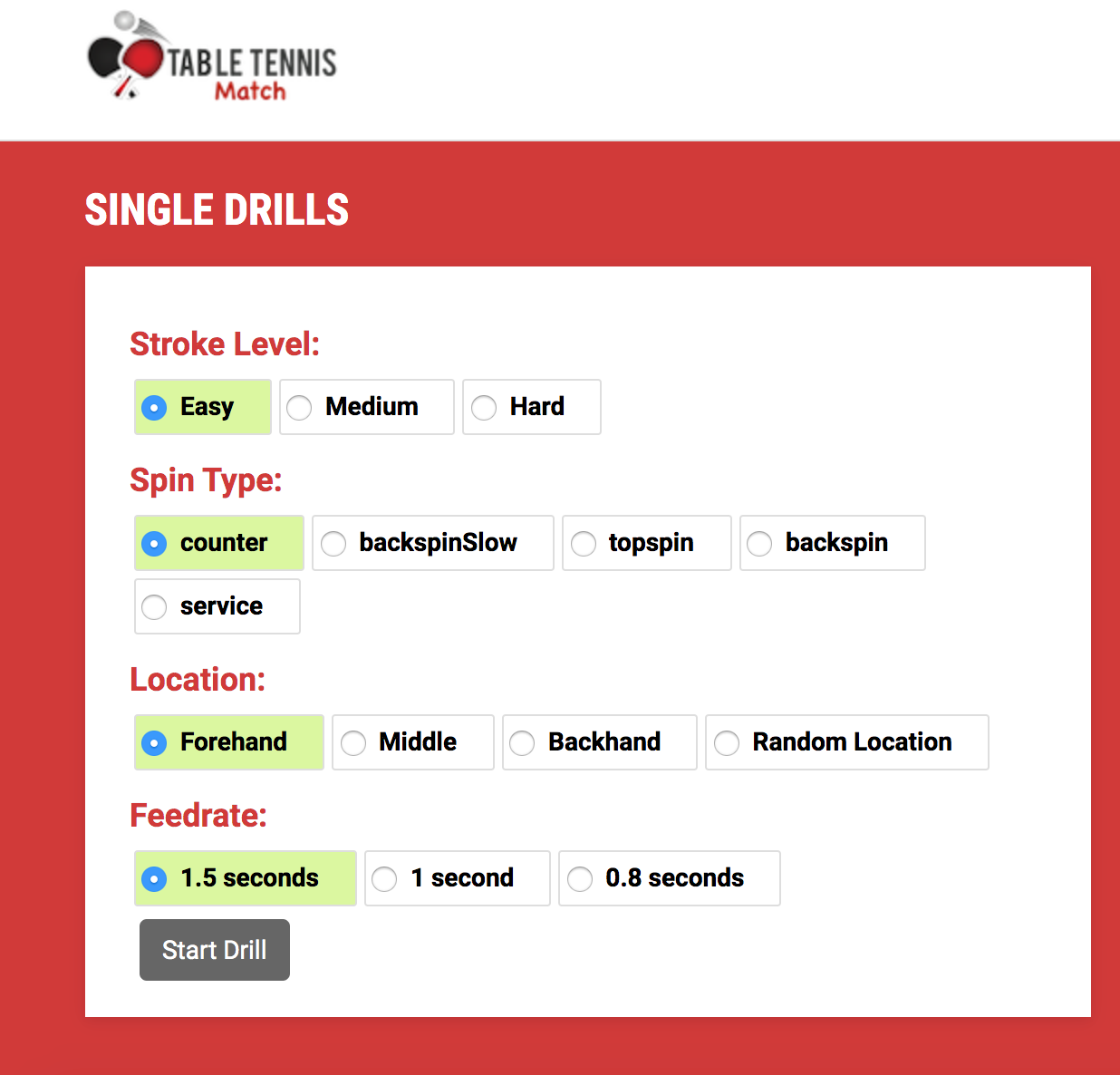
Single Drills:
A single stroke to a user-defined location and chosen speed
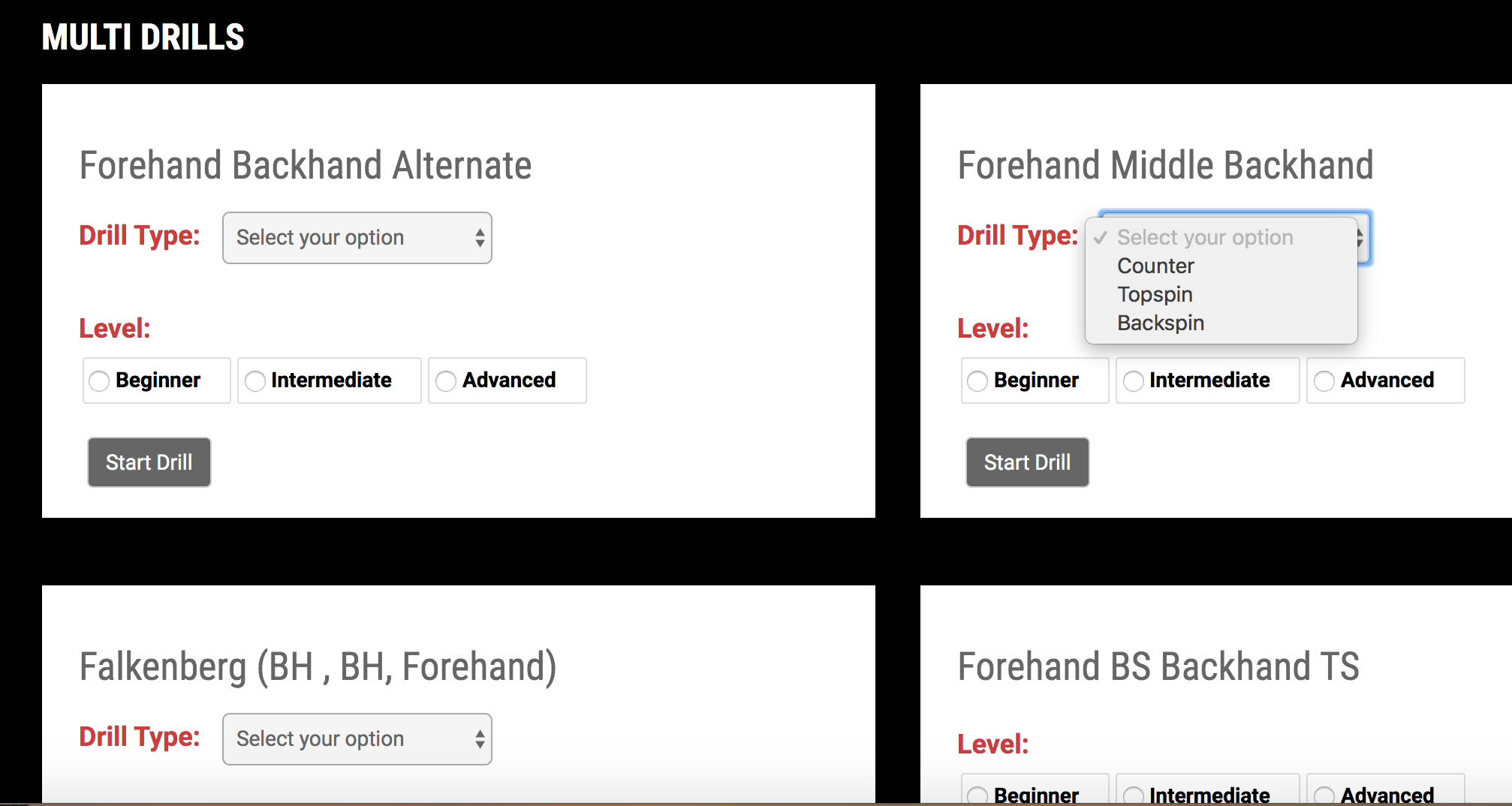
Pre configured drills:
We have a pre-configured set of available drills
Dynamic drills:
Setup drills as per your choice, this is very flexible, and the levels can be combined and the feedrate can be set as per your choice